
در دنیای رباتیک، چرخ یکی از حیاتیترین اجزای مکانیکی است که مستقیماً بر کارایی، دقت و پایداری حرکت ربات تأثیر میگذارد. انتخاب صحیح نوع چرخ، نهتنها به بهبود عملکرد حرکتی کمک میکند، بلکه موجب کاهش استهلاک قطعات، صرفهجویی در مصرف انرژی و افزایش طول عمر سیستم نیز میشود. بسیاری از پروژههای آموزشی، صنعتی و پژوهشی به دلیل بیتوجهی به انتخاب چرخ مناسب، در مراحل آزمون و خطا دچار مشکل میشوند؛ از لغزش روی سطوح صاف گرفته تا گیرکردن در سطوح ناهموار یا فرسایش سریع لاستیک. برند ایکانو (Ekano) با تجربه گسترده در زمینه تولید و عرضه تجهیزات رباتیک، همواره بر اهمیت انتخاب آگاهانه و تخصصی تأکید دارد. درک ویژگیهای سطح و نوع چرخ، اولین گام برای طراحی رباتی هوشمند و کارآمد است.
تأثیر نوع سطح بر عملکرد ربات
هر سطحی ویژگیهای خاص خود را دارد و چرخ باید متناسب با آن انتخاب شود. برای مثال، سطح سرامیک صاف و لغزنده است، بنابراین استفاده از چرخهایی با جنس لاستیکی نرم و الگوی عاجدار باعث افزایش اصطکاک و کنترل بهتر حرکت میشود. در مقابل، پارکت علاوه بر لغزندگی نسبی، ممکن است با فشار زیاد آسیب ببیند؛ در نتیجه، چرخهایی با فشار توزیعشده و وزن سبکتر گزینهای مناسبتر هستند. اما در محیطهایی مانند چمن مصنوعی، وضعیت کاملاً متفاوت است؛ این سطوح ناهموارند و مقاومت حرکتی بیشتری دارند، بنابراین باید از چرخهایی با قطر بزرگتر و عاجهای عمیقتر استفاده کرد تا ربات توان عبور از بافت متراکم چمن را داشته باشد. درک این تفاوتها کمک میکند تا ربات در هر محیطی عملکردی روان و قابل پیشبینی ارائه دهد، بدون آنکه نیازی به تنظیم مکرر موتورها یا اصلاح کدهای کنترلی باشد.
نقش چرخ در مصرف انرژی، دقت حرکت و دوام قطعات مکانیکی
چرخ مستقیماً با سطح تماس دارد و کوچکترین ناهماهنگی در جنس یا طراحی آن میتواند در مصرف انرژی و دقت حرکتی ربات اثرگذار باشد. اگر اصطکاک بیش از حد باشد، موتور مجبور است انرژی بیشتری صرف غلبه بر مقاومت سطح کند و در نتیجه باتری سریعتر تخلیه میشود. از سوی دیگر، چرخهای بسیار سخت یا نامناسب باعث کاهش دقت در مسیر حرکت، افزایش لغزش و فشار مضاعف بر گیربکس و محورهای مکانیکی میشوند. برند ایکانو در طراحی محصولات خود همواره به این توازن میان بازده حرکتی و دوام مکانیکی توجه دارد. انتخاب چرخ مناسب باعث کاهش ارتعاش، افزایش کنترل حرکتی و در نهایت، افزایش عمر مفید کل سیستم میشود. این موضوع بهویژه در رباتهای پژوهشی یا آموزشی که ساعات طولانی در حال آزمایش هستند، اهمیت ویژهای دارد.

فروشگاه اینترنتی EKANO
خطاهای رایج در انتخاب چرخ برای رباتهای آموزشی و پژوهشی
یکی از اشتباهات رایج، انتخاب چرخ صرفاً بر اساس ظاهر یا قیمت است. بسیاری از مبتدیان در رباتیک، بدون توجه به جنس سطحی که ربات روی آن حرکت میکند، از چرخهای عمومی یا ارزانقیمت استفاده میکنند. نتیجه، عملکرد ضعیف، لغزشهای مکرر و استهلاک سریع است. اشتباه دیگر، عدم تناسب میان قطر چرخ و توان موتور است؛ چرخهای بزرگ نیازمند گشتاور بالاتری هستند، در حالیکه موتورهای آموزشی اغلب توان محدودی دارند. همچنین، غفلت از تراز بودن محور و یاتاقانها موجب لرزش، انحراف مسیر و کاهش دقت حرکتی میشود. راهکار مؤثر این است که قبل از خرید، مشخصات فنی سطح، نوع موتور و وزن ربات دقیق بررسی شود. ایکانو با ارائه راهنمای انتخاب چرخ و پشتیبانی فنی، به کاربران کمک میکند تا از بروز این اشتباهات جلوگیری کنند و بازدهی سیستم خود را به حداکثر برسانند.
آشنایی با انواع چرخهای رباتیک و کاربرد هرکدام
شناخت انواع چرخها، بخش اساسی فرآیند طراحی و انتخاب قطعات در رباتیک است. هر نوع چرخ بر اساس ساختار، جنس و شکل ظاهری، ویژگیهای خاصی در حرکت و کنترل ارائه میدهد. در واقع، چرخ نهتنها وظیفه انتقال نیرو از موتور به سطح را دارد، بلکه نقش مهمی در پایداری، جهتپذیری و حتی مصرف انرژی ایفا میکند. انتخاب آگاهانه میان چرخهای توپر، بادی، فومی، اُمنی یا مِکانوم، به طراح ربات کمک میکند تا بسته به سطح حرکت، نوع مأموریت و وزن کلی سیستم، بهترین ترکیب را به کار گیرد. هرکدام از این مدلها در موقعیتهای خاصی عملکرد بهینه دارند و آشنایی با تفاوتهای فنی و کاربردی آنها، مسیر تصمیمگیری خرید را آسانتر و دقیقتر میسازد.
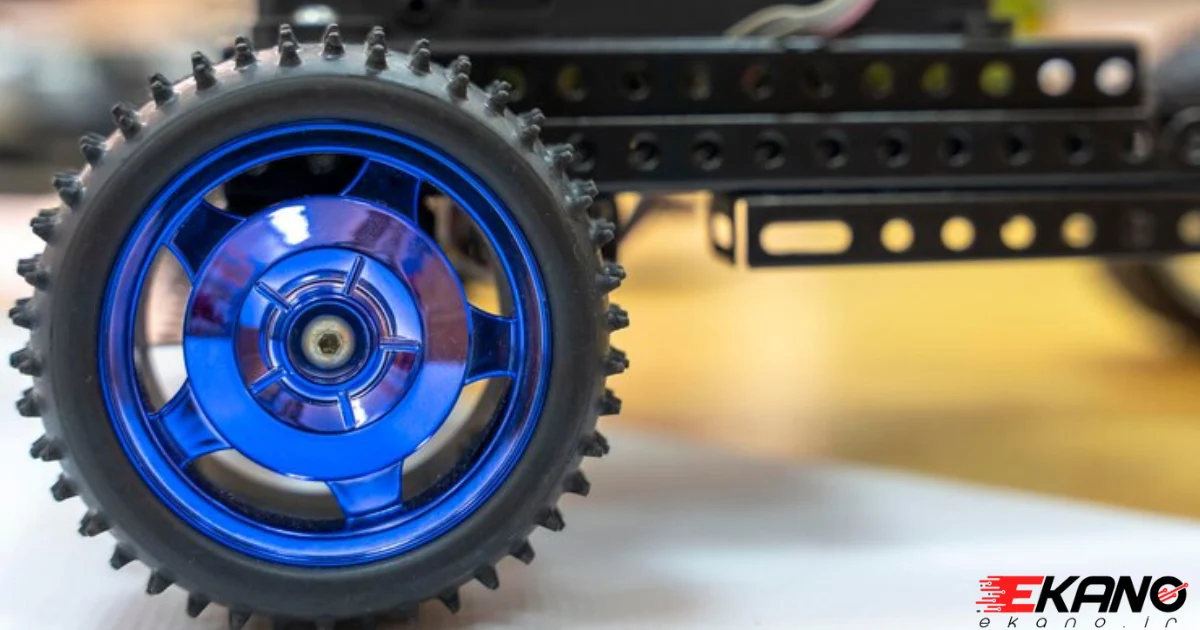
چرخهای توپر (Rubber / TPU)
چرخهای توپر، معمولاً از لاستیک یا مواد ترموپلاستیک مانند TPU ساخته میشوند و بیشترین کاربرد را در رباتهای آموزشی و کوچک دارند. این نوع چرخها به دلیل ساختار فشرده و بدون هوا، مقاومت بالایی در برابر فشار و سایش دارند. برتری آنها در سطوح صاف مانند سرامیک و پارکت آشکار است، زیرا تماس کامل با سطح برقرار میکنند و لغزش کمی دارند. از طرفی، بهدلیل وزن نسبتاً پایین و نیاز اندک به نگهداری، برای پروژههایی که پایداری حرکتی مهمتر از سرعت است، گزینهای ایدهآل محسوب میشوند. با این حال، در سطوح ناهموار مانند چمن مصنوعی، ممکن است انتقال ارتعاش و کاهش چسبندگی مشکلساز شود. بنابراین، انتخاب چرخ توپر زمانی توصیه میشود که ربات در محیطهای کنترلشده یا داخلی مورد استفاده قرار گیرد.
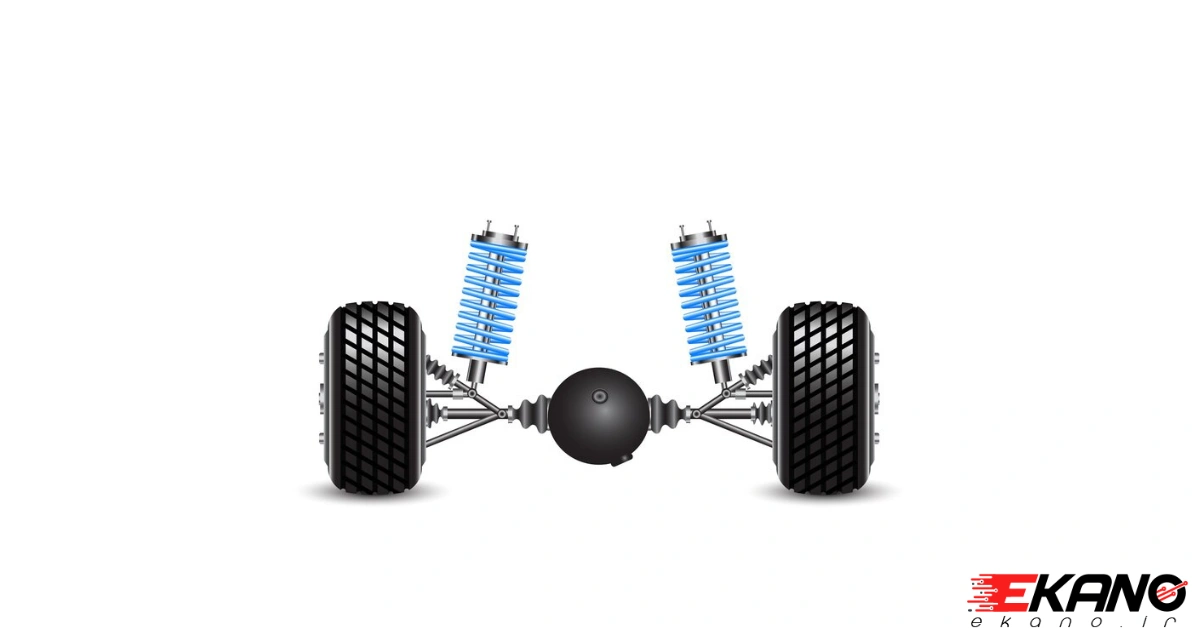
چرخهای بادی و فومی
چرخهای بادی با ساختاری مشابه تایر خودرو، دارای محفظه هوای داخلی هستند که امکان جذب ضربه و ارتعاش را فراهم میکند. این ویژگی سبب میشود ربات در سطوح ناهموار مانند چمن مصنوعی، سنگفرش یا آسفالت، حرکت روانتری داشته باشد. چرخهای فومی نیز گزینهای سبکتر هستند که بهجای هوا از مواد متخلخل استفاده میکنند و در جذب لرزش عملکردی مشابه دارند. تفاوت اصلی در این است که چرخهای بادی نیاز به بادگیری و نگهداری دورهای دارند، در حالی که چرخهای فومی سادهتر و کمهزینهترند. این نوع چرخها برای رباتهایی که در محیطهای بیرونی یا شرایط متغیر فعالیت میکنند بسیار مناسباند، زیرا ضمن کاهش فشار به محور و گیربکس، باعث حفظ تعادل و کنترل دقیقتر در مسیرهای غیرمسطح میشوند.
چرخهای اُمنی و مِکانوم
چرخهای اُمنی و مِکانوم از جمله نوآورانهترین طراحیها در رباتیک محسوب میشوند و به ربات امکان حرکت در تمام جهات بدون نیاز به تغییر زاویه بدنه را میدهند. چرخ اُمنی دارای رولرهای جانبی است که باعث میشود ربات بتواند بهراحتی چپ و راست یا حتی بهصورت مورب حرکت کند. نوع مِکانوم با زاویهدار بودن رولرها، قابلیت جابهجایی جانبی دقیقتری دارد و در رباتهای صنعتی یا رقابتی کاربرد گستردهای پیدا کرده است. مزیت اصلی این چرخها در محیطهای محدود یا فضاهایی است که نیاز به مانور بالا وجود دارد، مانند انبارها یا خطوط مونتاژ. البته باید در نظر داشت که این چرخها برای سطوح صاف مانند سرامیک و پارکت مناسبترند و روی چمن مصنوعی یا سطوح نرم کارایی کمتری دارند. انتخاب این نوع چرخها معمولاً زمانی انجام میشود که اولویت اصلی، دقت کنترل و انعطاف حرکتی باشد، نه قدرت کشش یا پایداری در زمینهای ناهموار.
فروشگاه اینترنتی EKANO
معیارهای فنی انتخاب چرخ مناسب
انتخاب چرخ مناسب تنها به ظاهر یا قیمت آن محدود نمیشود؛ بلکه مجموعهای از عوامل فنی در کارایی نهایی ربات نقش دارند. درک این معیارها به طراح کمک میکند تا بین سرعت، توان، پایداری و دقت حرکتی تعادل برقرار کند. عواملی مانند قطر و عرض چرخ، جنس لاستیک، سختی سطح تماس و نوع اتصال به محور یا موتور، هرکدام تأثیر مستقیمی بر عملکرد سیستم حرکتی دارند. اگر این مؤلفهها به درستی انتخاب شوند، ربات میتواند در سطوح مختلف از جمله سرامیک، پارکت یا چمن مصنوعی، بدون افت بازده یا خطای حرکتی عمل کند. شناخت این پارامترها، گامی ضروری در مسیر طراحی رباتی پایدار، دقیق و قابل اطمینان است.
جنس لاستیک و سختی
سختی لاستیک، که معمولاً با شاخص Shore A سنجیده میشود، تعیینکننده میزان چسبندگی چرخ با سطح است. هرچه عدد Shore A کمتر باشد، لاستیک نرمتر و چسبندگی آن بیشتر است، اما در عوض سریعتر فرسوده میشود. لاستیکهای سختتر دوام بیشتری دارند ولی ممکن است در سطوح صاف دچار لغزش شوند. برای سطوحی مانند سرامیک و پارکت، انتخاب لاستیک با سختی متوسط (حدود ۶۰ تا ۷۰ Shore A) گزینهای متعادل است، زیرا هم اصطکاک کافی فراهم میکند و هم از سایش زودهنگام جلوگیری میکند. در محیطهای ناهموار یا چمن مصنوعی، لاستیک نرمتر با الگوی عاجدار عملکرد بهتری دارد، چون توانایی جذب ضربه و افزایش چسبندگی را همزمان فراهم میکند. آشنایی با مفهوم سختی و درک رابطه آن با جنس سطح، یکی از ویژگیهای مهم طراحان حرفهای ربات است.
نوع اتصال به محور یا موتور
روش اتصال چرخ به محور موتور یکی از جزئیات فنی مهم است که اغلب نادیده گرفته میشود. نوع اتصال باید متناسب با شکل محور، نوع موتور و گشتاور موردنیاز انتخاب شود تا از لغزش یا لقی جلوگیری کند. اتصال D-shaft که در آن محور دارای برش صاف است، یکی از رایجترین روشها برای رباتهای سبک و آموزشی محسوب میشود، زیرا نصب سادهای دارد و از چرخش آزاد جلوگیری میکند. اتصال hex یا ششضلعی معمولاً در رباتهای سنگینتر و چرخهای صنعتی به کار میرود و گشتاور بالاتری را تحمل میکند. برای سروو موتورها، استفاده از براکتهای مخصوص یا کوپلینگ فلزی موجب میشود چرخ دقیقتر بچرخد و فشار یکنواختتری به محور منتقل شود. انتخاب نادرست نوع اتصال میتواند باعث شکستگی، لقی یا از بین رفتن تراز چرخها شود، بنابراین در کنار انتخاب قطر و جنس، این عامل نیز باید با دقت بررسی شود.
فروشگاه اینترنتی EKANO
ویژگیهای سطوح مختلف – سرامیک، پارکت و چمن مصنوعی
هر سطحی که ربات بر روی آن حرکت میکند، ویژگیهای فیزیکی خاصی دارد که بر رفتار چرخ و کل سیستم حرکتی تأثیر میگذارد. شناخت این ویژگیها کمک میکند تا انتخاب چرخ نه صرفاً بر اساس ظاهر یا قیمت، بلکه با دیدگاه مهندسی انجام شود. تفاوت در اصطکاک، سختی، ناهمواری و میزان مقاومت سطح باعث میشود که نوع چرخ، جنس لاستیک و حتی شکل عاج آن تغییر کند. سه سطح متداول که بیشتر در پروژههای آموزشی و خانگی یا پژوهشهای دانشگاهی دیده میشوند، شامل سرامیک، پارکت و چمن مصنوعی هستند. در ادامه به بررسی ویژگیهای مکانیکی و نیاز هرکدام پرداخته میشود.
سطح سرامیکی
سطح سرامیکی به دلیل صیقلی و صاف بودن، یکی از چالشبرانگیزترین محیطها برای حرکت ربات محسوب میشود. میزان اصطکاک در این نوع سطح پایین است و کوچکترین خطای طراحی در چرخ یا کد کنترلکننده میتواند موجب لغزش یا چرخش نامطلوب شود. در چنین محیطی، استفاده از چرخهایی با لاستیک نرم و الگوی سطحی عاجدار ضروری است تا تماس کاملتری با زمین برقرار شود و لغزش کاهش یابد. چرخهای نرم با گریپ بالا کمک میکنند تا نیرو بهصورت یکنواخت منتقل شده و کنترل حرکتی دقیقتر شود. همچنین بهتر است از چرخهایی با قطر متوسط استفاده شود تا مرکز ثقل ربات بیش از حد بالا نرود و تعادل حفظ شود. این نوع تنظیم برای رباتهای خانگی، آموزشی و نظافتی که در محیطهای سرامیکی فعالیت میکنند، کاملاً مناسب است.
سطح پارکت یا چوبی
پارکت و کفپوشهای چوبی در ظاهر مشابه سرامیک هستند، اما از نظر واکنش مکانیکی بسیار متفاوتاند. این سطوح در برابر فشار و اصطکاک زیاد حساساند و بهراحتی دچار خراش یا تغییر رنگ میشوند. بنابراین استفاده از چرخهای سخت یا عاجدار روی چنین سطحی میتواند آسیبزا باشد. بهترین گزینه برای این نوع سطوح، چرخهایی با روکش لاستیکی نرم و سطح صاف است که بدون ایجاد فشار نقطهای حرکت میکنند. همچنین وزن کل ربات باید بهگونهای تنظیم شود که نیروی تماس بیش از حد بر سطح وارد نکند. از نظر حرکتی نیز، چرخهای با عرض متوسط عملکرد بهتری دارند چون توزیع وزن را بهصورت یکنواخت انجام میدهند. این ترکیب باعث میشود ربات ضمن حفظ کنترل حرکتی، سطح کف را نیز محافظت کند.
سطح چمن مصنوعی
چمن مصنوعی بهدلیل الیاف فشرده و ساختار ناهموار خود، بیشترین مقاومت حرکتی را در میان این سه نوع سطح دارد. حرکت در چنین محیطی مستلزم انتخاب چرخهایی با قطر بزرگتر و عاجهای عمیق است تا بتوانند روی برجستگیها و فضاهای خالی بین الیاف غلبه کنند. چرخهای بادی یا فومی نیز برای این سطوح گزینهای مناسب هستند، زیرا قابلیت جذب لرزش و حفظ تعادل را دارند. افزایش قطر چرخ علاوه بر عبور آسانتر از موانع کوچک، باعث میشود نیرو بهصورت یکنواختتری پخش شود و ربات در مسیر خود کمتر متوقف شود. از طرف دیگر، استفاده از لاستیک با سختی پایین و چسبندگی بالا به جلوگیری از لغزش کمک میکند. چنین ترکیبی برای رباتهای پژوهشی میدانی یا نمونههای تستی که در محیطهای طبیعی یا نیمهطبیعی کار میکنند، بیشترین بازده را فراهم میآورد.
فروشگاه اینترنتی EKANO
تطبیق نوع چرخ با سطح کار
یکی از دغدغههای اصلی طراحان و کاربران ربات، انتخاب سریع و دقیق نوع چرخ متناسب با محیط کاری است. وجود یک جدول راهنما و نمودار مقایسهای، باعث میشود تصمیمگیری سادهتر، علمیتر و مبتنی بر داده باشد. در این بخش، ویژگیهای کلیدی سه نوع سطح رایج — سرامیک، پارکت و چمن مصنوعی — با پارامترهای فنی چرخ مقایسه میشوند. هدف، ارائه مرجعی کاربردی است که بتواند هم برای دانشجویان و هم برای مهندسان در طراحی پروژههای واقعی مفید باشد.
جدول مقایسه: نوع سطح ↔ قطر ↔ جنس ↔ نوع چرخ پیشنهادی
در جدول زیر، میتوان مشاهده کرد که برای هر نوع سطح، چه ترکیب فنی از چرخ مناسبتر است. این جدول نهتنها از نظر انتخاب جنس و سختی لاستیک کاربرد دارد، بلکه به طراح در تخمین مصرف انرژی و کنترل حرکتی نیز کمک میکند.
| نوع سطح | قطر چرخ پیشنهادی | جنس لاستیک | نوع چرخ مناسب | ویژگی خاص |
|---|---|---|---|---|
| سرامیک | 60 تا 80 میلیمتر | لاستیک نرم (Shore A 60–70) | توپر یا TPU | گریپ بالا، بدون لغزش |
| پارکت / چوبی | 70 تا 90 میلیمتر | لاستیک نرم یا فوم صاف | توپر بدون عاج | محافظت از سطح و حرکت آرام |
| چمن مصنوعی | 100 تا 130 میلیمتر | لاستیک نرم با عاج عمیق | بادی یا فومی | جذب لرزش، چسبندگی بالا |
نکات نصب و نگهداری چرخ در پروژههای آموزشی
در پروژههای آموزشی رباتیک، انتخاب، نصب و نگهداری صحیح چرخ نقش مهمی در عملکرد و دوام ربات دارد. چرخها باید کاملاً تراز و هممرکز با محور نصب شوند تا از لرزش و انحراف مسیر جلوگیری شود. در صورت شل بودن اتصالات یا بیدقتی در محکمکاری، فشار اضافی به موتور و گیربکس وارد میشود و دقت حرکت کاهش مییابد. برای افزایش طول عمر چرخها، بررسی منظم محور، سفت کردن بستها و استفاده از گریس مناسب در یاتاقانها ضروری است. همچنین باید دقت شود روانکننده با لاستیک تماس نداشته باشد، چون موجب لغزش ناخواسته و افت اصطکاک میشود.
اشتباهات متداول کاربران در انتخاب چرخ ربات
در بسیاری از پروژههای آموزشی و حتی حرفهای، انتخاب نادرست چرخ یکی از اصلیترین دلایل افت عملکرد ربات است. اشتباه در نوع لاستیک، اندازه قطر، یا نحوه اتصال به محور میتواند باعث لغزش، ناپایداری یا حتی آسیب مکانیکی شود. درک این خطاها و پرهیز از آنها نهتنها موجب بهبود کیفیت طراحی میشود، بلکه از اتلاف وقت و هزینه جلوگیری میکند. آگاهی از این نکات به کاربران کمک میکند تا تصمیمات فنی خود را بر اساس داده و تجربه بگیرند، نه صرفاً ظاهر یا قیمت قطعه.
استفاده از چرخهای سخت روی سطوح لغزنده
یکی از خطاهای متداول، استفاده از چرخهای پلاستیکی یا بسیار سخت در سطوح صاف و لغزنده مانند سرامیک است. این نوع چرخها به دلیل سختی بالا، اصطکاک کمی دارند و کنترل حرکت را دشوار میکنند. نتیجه معمولاً لغزشهای پیدرپی، چرخش ناگهانی یا از دست رفتن تعادل ربات است. در چنین شرایطی، لاستیک نرم با الگوی سطحی مناسب انتخاب بهتری است، زیرا تماس بیشتری با زمین دارد و باعث افزایش پایداری میشود. بسیاری از کاربران تازهکار به اشتباه تصور میکنند چرخ سخت دوام بیشتری دارد، در حالیکه در محیطهای لغزنده، عملکرد حرکتی را بهشدت کاهش میدهد.
بیتوجهی به قطر چرخ و تأثیر آن بر سرعت ربات
چرخ با قطر زیاد باعث افزایش سرعت خطی ربات میشود، اما اگر توان موتور با آن متناسب نباشد، گشتاور کافی برای شروع حرکت یا عبور از مانع وجود نخواهد داشت. در مقابل، چرخ کوچک کنترل دقیقتری دارد ولی سرعت را کاهش میدهد. بسیاری از کاربران، بدون در نظر گرفتن وزن کلی ربات یا نوع سطح، از چرخهایی استفاده میکنند که بیش از حد بزرگ هستند و در نتیجه موتور تحت فشار قرار میگیرد. این اشتباه در پروژههای آموزشی رایج است و موجب داغ شدن موتور یا مصرف زیاد باتری میشود. انتخاب قطر باید بر اساس توازن میان سرعت، گشتاور و وزن کلی سیستم انجام شود تا ربات عملکردی پایدار داشته باشد.

فروشگاه اینترنتی EKANO
نتیجه گیری
انتخاب چرخ مناسب برای ربات، تصمیمی فنی و اساسی است که بر سرعت، دقت، پایداری و دوام کل سیستم تأثیر مستقیم دارد. عوامل مختلفی مانند نوع سطح (سرامیک، پارکت یا چمن مصنوعی)، جنس و سختی لاستیک، قطر چرخ، نوع اتصال به محور و نحوه نصب و نگهداری، همگی در عملکرد نهایی نقش دارند. چرخ نرم برای سطوح صاف و لغزنده مناسب است، در حالیکه چرخهای عاجدار یا بادی در سطوح ناهموار کارایی بیشتری دارند. توجه به تراز محور، تمیزکاری منظم و بررسی دورهای نیز از استهلاک و خطاهای حرکتی جلوگیری میکند. آگاهی از این نکات به طراحان و دانشجویان کمک میکند تا با درک علمی و تجربه عملی، رباتهایی با حرکت پایدار، کنترل دقیق و طول عمر بالا طراحی کنند.
سوالات متداول
1. برای حرکت ربات روی سطح سرامیکی چه نوع چرخی مناسبتر است؟
چرخهایی با لاستیک نرم و سطح عاجدار بهترین گزینه برای سطوح سرامیکی هستند، زیرا اصطکاک را افزایش میدهند و از لغزش جلوگیری میکنند. قطر متوسط (۶۰ تا ۸۰ میلیمتر) نیز به حفظ تعادل و کنترل کمک میکند.
2. چه تفاوتی بین چرخهای توپر، بادی و فومی وجود دارد؟
چرخهای توپر دوام بالایی دارند و برای محیطهای داخلی مناسباند، در حالیکه چرخهای بادی و فومی بهدلیل جذب ارتعاش و نرمی، برای سطوح ناهموار مانند چمن مصنوعی انتخاب بهتری هستند.
3. چگونه قطر چرخ بر سرعت و گشتاور ربات تأثیر میگذارد؟
قطر بزرگتر باعث افزایش سرعت خطی ربات میشود اما گشتاور را کاهش میدهد. در مقابل، چرخ کوچک کنترل دقیقتری دارد و برای رباتهای سبک یا آموزشی مناسبتر است.
4. برای نصب صحیح چرخ روی محور موتور چه نکاتی باید رعایت شود؟
محور باید کاملاً تراز و هممرکز با چرخ نصب شود تا از لرزش و انحراف جلوگیری شود. استفاده از کوپلینگ یا آداپتور مناسب (D-shaft یا hex) باعث اتصال ایمن و پایدار میشود.
5. چگونه میتوان از فرسودگی زودهنگام چرخها جلوگیری کرد؟
بررسی منظم محور، محکمکاری اتصالات، تمیز کردن گرد و غبار و اجتناب از تماس روانکننده با لاستیک از مهمترین روشهای افزایش عمر چرخ هستند. نگهداری منظم عملکرد ربات را پایدار نگه میدارد.
6. چرا انتخاب نادرست چرخ میتواند باعث عملکرد ضعیف ربات شود؟
چرخ نامناسب ممکن است باعث لغزش، مصرف بالای انرژی، لرزش یا استهلاک گیربکس شود. انتخاب آگاهانه بر اساس نوع سطح، وزن ربات و توان موتور، از این مشکلات جلوگیری کرده و عملکرد سیستم را بهینه میکند.
با ما در تماس باشید